Hybrid Kalman Filter
Most physical systems are represented as continuous-time models while discrete-time measurements are frequently taken for state estimation via a digital processor. Therefore, the system model and measurement model are given by

where
- .
- Initialize

- Predict
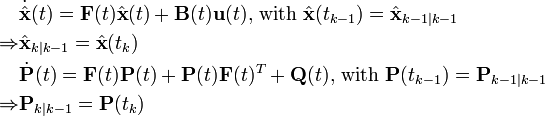
The prediction equations are derived from those of continuous-time Kalman filter without update from measurements, i.e., . The predicted state and covariance are calculated respectively by solving a set of differential equations with the initial value equal to the estimate at the previous step.
- Update
The update equations are identical to those of discrete-time Kalman filter.
Read more about this topic: Kalman Filter
Related Subjects
Related Phrases
Related Words